
Fra perspektivet til funksjonell struktur er utførelsen av vakuumgeneratoren hovedsakelig den elektromagnetiske kontrollventilen for å kontrollere vakuumgeneratoren for å realisere negativ trykkgenerering og stopp, for å oppnå funksjonen til å tiltrekke og frigjøre arbeidsstykket.
Som et resultat inkluderer systemet generelt følgende komponenter: 1. Trykkluftkilde;2. Filter;3. Bytt magnetventil;4. Vakuumaktuator;5. Ende sugekopp, kollisjonspute osv. (En typisk struktur er vist i figuren under).
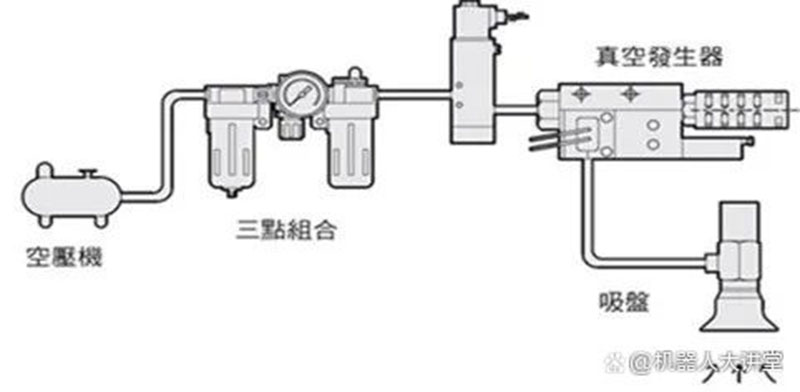
I tillegg, under kravene til industriell automatisering, for å realisere overvåkingen av vakuumadsorpsjonsprosessen, legger noen produsenter generelt til pneumatiske kontrollkomponenter som strømningsmålere, trykkdeteksjonsbrytere og nærhetsbrytere til systemet de siste årene.
Men siden de fleste komponentene er modifisert av integratoren i henhold til kundenes behov og arbeidsforhold på stedet, er kompleksiteten til hele systemet ofte høy.
Samtidig fører flere komponentprodusenter til komplekst installasjons- og idriftsettelsesarbeid på stedet, og noen av dem har høyt energiforbruk og 100 % avhengighet av gasskilder.Delvis integrasjon er kanskje ikke mulig
Unngå støyforurensning, noe som betyr uakseptable problemer for miljøer med høy presisjon og høy renhet som litiumbatterier og halvledere.
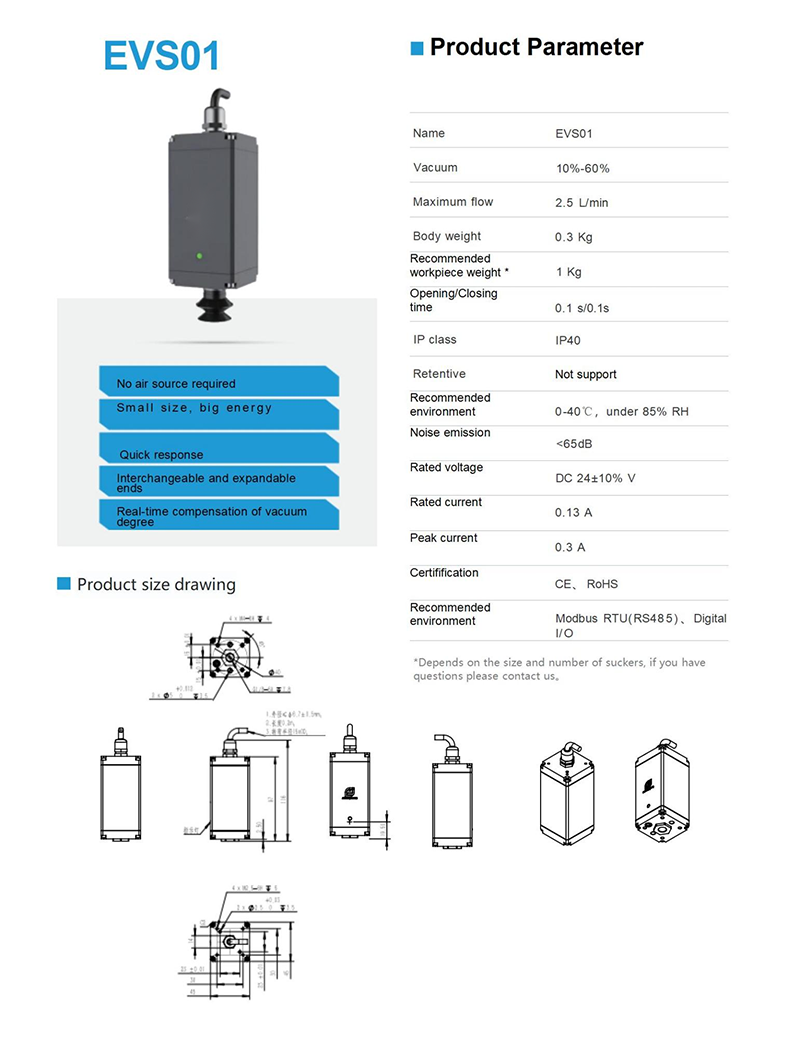
I det hele tatt er EVS en ny generasjon elektriske intelligente vakuumaktuatorer som ikke krever en ekstra trykkluftkilde, noe som utvilsomt er iøynefallende.
Den største fordelen med det luftbesparende systemet er dets enkle installasjon.Fordi dette utvilsomt kan redusere mange hjelpekomponenter, inkludert luftkompressorer, luftlagringstanker, luftrenseutstyr og utgangsrør, etc., noe som gjør kablingen enklere og mer praktisk og oversiktlig for kundene å bruke.
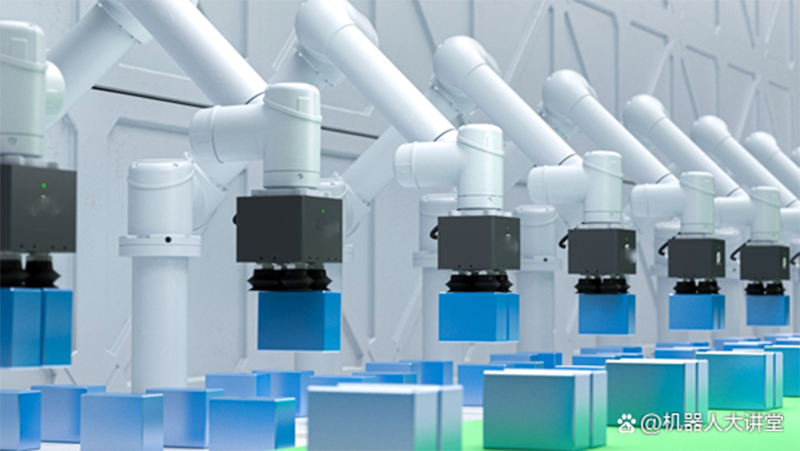
Det er rapportert at mange scener, inkludert mobile robotplattformer, 3C elektronisk montering, produksjon av litiumbatterier, produksjon av halvledere, ekspresslogistikk osv. har en relativt kompakt plassoppsett.
EVS08 suge firkantet batteri
Flere detaljer og fordeler
Robotforelesningssalen lærte at dette produktet, som ser veldig lite ut og veier bare 2,5 kg, kan nå et høyt nivå på 10 kg.På grunn av 24V lavspenningsdesign er energiforbruket 20% av det tradisjonelle pneumatiske systemet, og adsorpsjonskraften på slutten kan stilles inn og justeres, og adsorpsjonskraften kan nå 102-510N.
Når det gjelder strukturell design, tar EVS i bruk en mer kompakt og lett strukturell design, som gjør EVS 30 % mindre enn tradisjonell aerodynamikk for samme last.
Samtidig kan den kobles direkte til kontakten på enden av robotarmen, noe som reduserer overflødige hjelpekomponenter, gjør den mer fleksibel å bruke, kan raskt utplasseres og kan enkelt absorbere flere store gjenstander, spesielt egnet for stabling, håndtering og andre sceneoperasjoner .
For å forbedre brukervennligheten har den elektriske vakuumaktuatoren også et integrert grensesnitt, som kan brukes til å kontrollere og overvåke hele prosessen med å adsorbere gjenstander.
Det rapporteres at dette er for kundenes bekvemmelighet å kontrollere vakuumgraden til vakuumaktuatoren gjennom instruksjoner, og også koble til gjennom IO-koblingen for overvåking og prediktivt vedlikehold av adsorpsjonsprosessen.Statusovervåking vil redusere feil og nedetid og sikre systemtilgjengelighet.
På dette grunnlaget gjenspeiles fordelene og egenskapene til EVS også i følgende punkter:
1. Kompakt struktur og lett vekt: EVS er 30 % mindre enn den tradisjonelle pneumatiske størrelsen når den absorberer samme last.Den kan kobles til kontakten på enden av den mekaniske armen for å realisere absorpsjon av lasten, spesielt egnet for stabling, håndtering og andre sceneoperasjoner;
2. Rikelig terminalkonfigurasjon: Ulike typer sugekopper, kollisjonsputer og andre komponenter kan konfigureres for å realisere griping av forskjellige objekter, inkludert firkantede, sfæriske og spesialformede komponenter;
3. Doble kanaler kan kontrolleres uavhengig: enkelt kontroller venstre og høyre side av vakuumaktuatoren, og de to sidene er uavhengige av hverandre, noe som ytterligere forbedrer arbeidseffektiviteten til produksjonslinjen.Den realiserer sug og plassering på samme tid, noe som i stor grad letter håndtering og sortering av gjenstander, og sparer plass og tid;
4. Justerbar sug: graden av vakuum kan justeres i henhold til egenskapene til det sugde produktet, og sanntidsvakuumkompensasjon kan realiseres;
5. Statustilbakemelding: Den har en vakuumtilbakemeldingssensor, som kan oppdage adsorpsjonsstatusen til objekter i sanntid, og gi tilbakemelding og alarm;
6. Beskyttelse mot strømavbrudd: Etter slått av kan den realisere adsorpsjonsavslåing selvlåsende for å beskytte de adsorberte gjenstandene;
7. Sterk tilpasningsevne: støtte 24V I/O og MODBUS RTU (RS485) kommunikasjonsprotokoll;
8. Enkel å installere og feilsøke: kommunikasjonsprotokollen er enkel og lesbar, noe som i stor grad reduserer vanskeligheten med å feilsøke.I tillegg kan vertsdatamaskinens feilsøkingsprogramvare legges ved som en gave, som kan stilles inn og redigeres for å sette funksjonsparametere offline.
Konklusjon og fremtiden
Under trenden med automatisering og intelligens har elektriske vakuumaktuatorer i økende grad blitt en nøkkelkomponent for å sikre normal drift av roboter og automasjonssystemer, noe som gjør bruken av elektriske aktuatorsystemer mer praktisk og enkel å bruke, og kan møte mer diversifiserte scenarier som f.eks. mobile komposittroboter..
Det integrerte grensesnittet og den rike terminalkonfigurasjonen og andre optimaliseringer kan ytterligere forbedre påliteligheten til nøkkelkomponentene til roboten, redusere produksjonsstans og fjerndistribusjonsproblemer for sluttbrukere, og ytterligere redusere vedlikeholds- og ettersalgskostnader.
Innleggstid: 19-apr-2023